Introduction
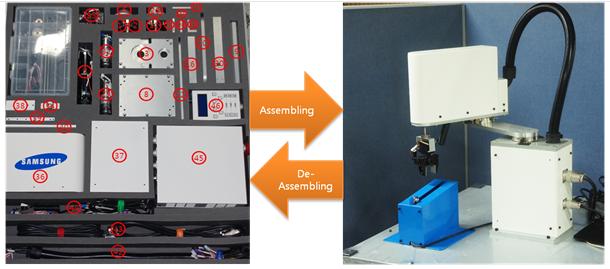
The purpose of this kit is to learn about structures of industrial Robot.
In particular, This kit focuses on assembling and/or deassembling of robot mechanism.
The controller is built based upon AVR_based open source(C language).
Robot Technology
- Robot Structure of industrial Robot Through Assembling and/or Deassembling
- Kinematics, Inverse Kinematics
- Step by Step Programming by scRIPT lanaguage



Share Educational Robot (GLOBOT - SSR1000) in Social Media